




















The Hamburg Port Authority along with IAPH launched a study focusing on the impact the autonomous vehicles have on port infrastructure requirements. The study presents what needs to be done in the sectors of road, rail, waterborne, and aerial transportation, so that the port industry adapts automation. The study also provides recommendations on steps to be taken for port authorities being prepared for the technological progress.
Firstly, autonomous driving is generally acknowledged as the shift of full responsibility of performing all driving and maneuvering tasks from a human individual to an autonomous system performing without any need of influence from the driver.
The task to drive consists of three categories:
- Navigation;
- Command;
- Stabilization.
The collected data gathered from autonomous vehicles can be used, from port authorities or even governments, to provide machine learning applications, improving the behaviour in traffic situations of all users, the continuous improvement of intelligent traffic control systems, eco-path finder for pollution control, which is a challenge ports are facing too or even safety and security solutions based on surveillance.
In addition, the study focuses on future prospects of autonomous railway transport in ports highlighting that a crucial challenge is the liability problem of the large co-operations. In other words, having no train driver as the legally responsible one, the whole cooperation will be liable in case of system failure for a complete passenger train or a freight train.
A further developed railway system for autonomous driving trains includes sensor and data transfer between trains, tracks and signals.
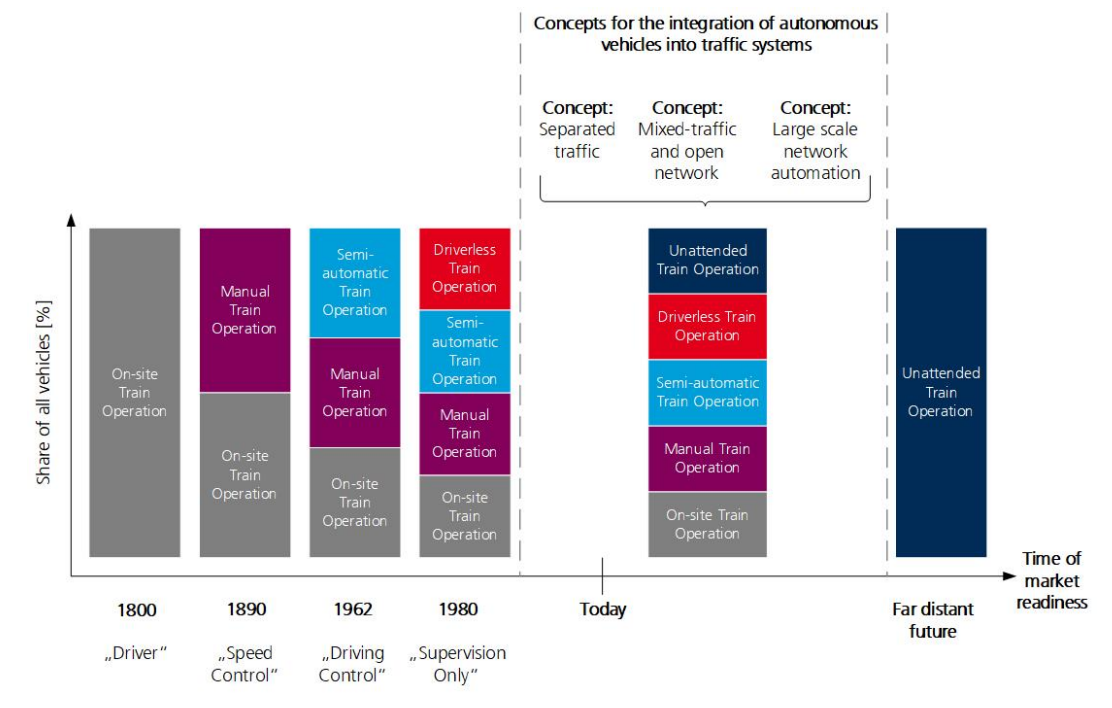
The image below presents the future development of autonomous driving in railway transport. The past developments have shown that depending on the traffic conditions the possibilities for implementation of autonomous driving are different.
There are three concepts of railway automation:
- Separated traffic;
- Mixed traffic and open network;
- Large scale network automation.
The Intelligent Transport Systems are to be the key to make infrastructure safer and increase its capacity; The European Parliament and the Council of the European Union (2010) defines ITS as follows:
Intelligent Transport Systems’ or ‘ITS’ means systems in which information and communication technologies are applied in the field of road transport, including infrastructure, vehicles and users, and in traffic management and mobility management, as well as for interfaces with other modes of transport.
However, to finally achieve constructing a vessel fully capable of driving itself, there are four basic interdependent functions:
- Navigation: Route planning using a digital map that includes information on vehicle location, weather, road type etc.; tracking relies on GPS (global positioning system); autonomous vehicles are capable of communicating with each other and usually with the given infrastructure via communication systems such as WLAN (wireless local area network).
- Situational analysis: Monitoring of the environment using visual image recognition techniques; additional positioning data can be obtained using markers embedded in the infrastructure; common sensor technology applied is long- /medium-/short range radar, LiDAR (light detection and ranging), camera, or ultrasound.
- Motion planning: Monitoring of the vehicle‘s movements by using sensors that determine a course of motion within a defined period of time avoiding any detected static object; decisions have to be made about adapting speed and direction; indicators such as the peoples‘ hand signals or facial expressions can be analyzed to improve the predictive ability.
- Trajectory control: Managing the execution of pre-planned changes in speed and direction; observation and maintenance of driving stability; actions in accelerating or braking and in adjustments to the steering are performed by the autonomous system.
Moving on, the report highlights that ports should be ready to serve their customers’ demand, concerning the future-use of semi-automated vehicles, being it road, rail, air or waterborne. The required steps to prepare for autonomous driving and flying depend on the existing digitalization degree of a port and on its responsibility for the port infrastructure.
The most important challenges to be tackled for the ports include:
- The infrastructural requirements;
- The vehicles’ technological requirements;
- Regulatory requirements;
- Data protection requirements (PKI-Public Key Infrastructure);
- Requirements in possible connection with additional services and business cases.
It is obvious that ports, either they are in favour of automation or not, will increase their competitive benefit making autonomous driving possible at the early stages, meaning that ports should begin adapting to technology and start, advisably together with the vehicle industry, test sites so called sandboxes.
Concluding, the report recommends, concerning waterborne infrastructure, port authorities to:
- Prepare the appearance of shore control centers for remotely controlled vessels;
- Depending on the responsibility of the port for the navigation within its coastal waters prepare the integration of advanced data transmission technology systems to support autonomous shipping within Vessel Traffic Service areas;
- Prepare for auto-mooring facilities if MASS sail completely unmanned to the terminals;
- Plan for training the involved personnel with the new processes arising.
To explore more, click on the PDF herebelow